블루투수의 사용법과 가속도 센서 연동하기.

재료는 다음과 같이 준비합니다.
아두이노, 브레드보드, 블루투스, 연결케이블 몇가닥 이번에는 사용안하지만 다음에는 MPU6050까지

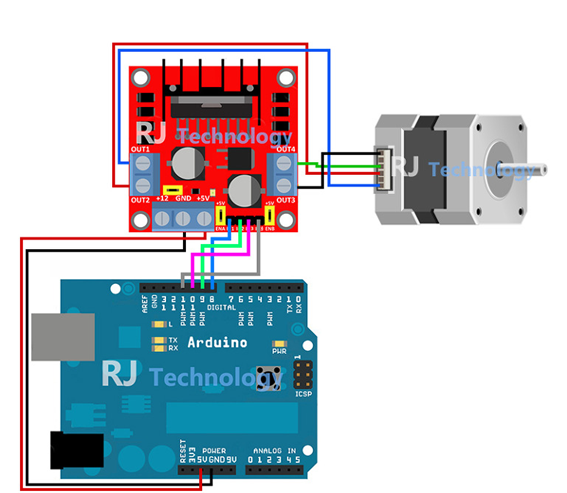
연결은 간단합니다. 블루투스에 기본 적으로 전원을 인가하고, 아두이노와 연결 가능하도록 TX,RX 단을 연결 합니다.
아두이노 - 블루투스
VCC - VCC (5번)
GND - GND (4번)
RX(10번) - TX (3번)
TX(11번) - RX (2번)
아두이노의 10번과 11번 핀은 가상핀으로 선택되어 실험될 예정입니다.

테스트용 프로그램을 활용해서 간단히 실험해볼 예정인데요.
아두이노를 켜고
파일=>예제=>SoftwareSerial => SoftwareSerialExample
다음과 같이 선택하면 아래와 같은 예제 프로그램이 열립니다.
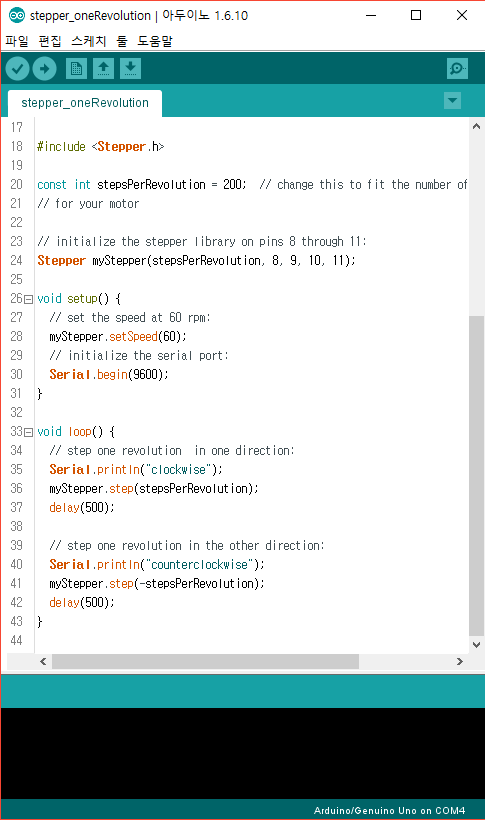
/*
Software serial multple serial test
Receives from the hardware serial, sends to software serial.
Receives from software serial, sends to hardware serial.
The circuit:
* RX is digital pin 10 (connect to TX of other device)
* TX is digital pin 11 (connect to RX of other device)
Note:
Not all pins on the Mega and Mega 2560 support change interrupts,
so only the following can be used for RX:
10, 11, 12, 13, 50, 51, 52, 53, 62, 63, 64, 65, 66, 67, 68, 69
Not all pins on the Leonardo support change interrupts,
so only the following can be used for RX:
8, 9, 10, 11, 14 (MISO), 15 (SCK), 16 (MOSI).
created back in the mists of time
modified 25 May 2012
by Tom Igoe
based on Mikal Hart's example
This example code is in the public domain.
*/
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); // RX, TX
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(57600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.println("Goodnight moon!");
// set the data rate for the SoftwareSerial port
mySerial.begin(9600);
mySerial.println("Hello, world?");
}
void loop() { // run over and over
if (mySerial.available()) {
Serial.write(mySerial.read());
}
if (Serial.available()) {
mySerial.write(Serial.read());
}
}
있는 것을 모두 불러왔는데요. 참고 하시면 가상핀 설정을 위해
SoftwareSerial mySerial(10, 11); // RX, TX 여기 부분만 활용해서 통신한다고 알면되고
10번과 11번 핀이 RX단자와 TX단자로 설정되고
통신속도를 맞춰 주면 된다라고 생각 하시면 됩니다.
mySerial.begin(9600); 여기 부분의 통신속도를 저는 9600으로 해뒀고
통신 단자와연결되는 장치의 속도가 9600이라고 이해 하시면 됩니다.
물론 기본 작업을 모두 하면 아두이노에 컴파일 다운로드 하시면 됩니다.

그럼 스마트폰에 확인을 위해서 간단한 터미널 프로그램이 있어야 되겠는데요.
전 블루투스터미널 HC-05를 사용합니다.
구글 플레이어에서 간단히 HC-05 이라고 검색하면 위와 같은 프로그램이 뜨는데요. 참고 하시면 됩니다.

바탕화면에 다음과 같이 설치되서 열게되면
스마트폰에 블루투스를 켜면 HC-05 라고 뜨게 될겁니다.
암호를 4자리 입력하라고 뜨면 1234로 초기 암호를 입력하면 되고요.
바탕화면에 있는 아이콘을 눌려서 접속하면 위와 같이 모듈이 선택되면 다시 클릭

접속하면 다음과 같이 간단히 뜨면 이것 저것 눌려보시면 익히기 편리 할겁니다.
하지면 접속된 상태이니 바로 통신은 가능하고요.

아두이노 쪽에서도 다음과 같이 터미널을 열게 되면 바로 텍스트 데이터를 주고 받습니다.

블루투스에서 test 하고 Send 보내게 되면 PC로 날아간 것을 확인 하게 됩니다.
'메이커스교육 > 아두이노교육' 카테고리의 다른 글
| [아두이노] 스테핑모터를 이용한 블라인드 제어 (0) | 2019.05.03 |
|---|---|
| [아두이노] 5강 스테핑모터 제어하기 (2) | 2019.05.01 |
| [아두이노] 4강 적외선 리모콘을 이용한 서보모터 제어 (0) | 2019.04.30 |
| [아두이노] 3강 출력제어 RC서보모터 제어하기 (0) | 2019.04.30 |
| [아두이노] 2강 아두이노의 입출력 (0) | 2019.04.28 |